Details
Real-Time Collision Avoidance for Autonomous Agents
Year: 2025
Term: Winter
Student Name: Justin Laalo
Supervisor: Mark Lanthier
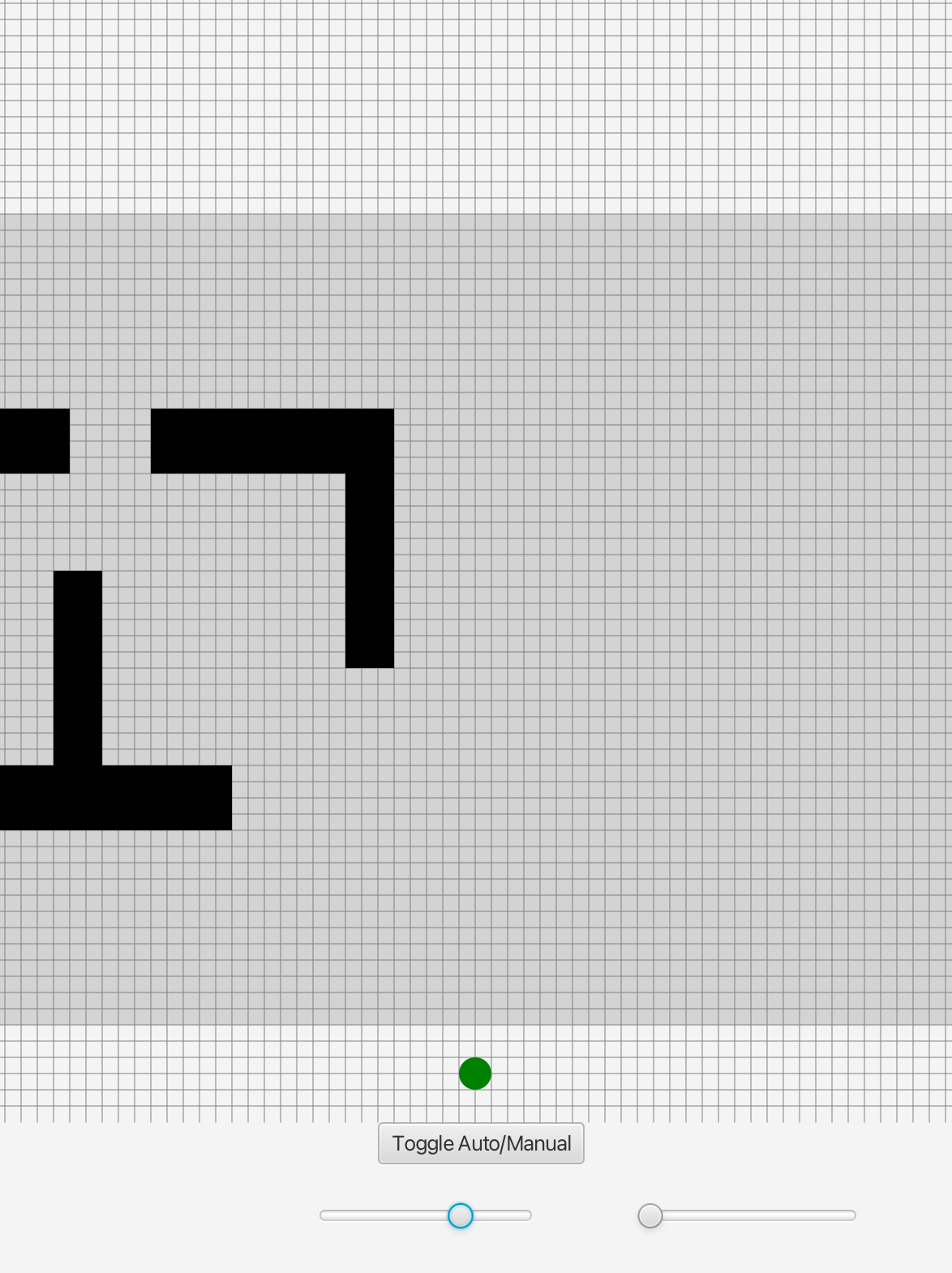
Abstract: This project focuses on real-time collision avoidance for autonomous agents within dynamic environments. The main goal is to develop a program that allows these agents to traverse a busy crossing such that they safely reach the desired location. To accomplish this we built a simple grid-based environment using JavaFX, with Dijkstra's algorithm as our underlying algorithm for traversal through the environment. The system incorporated real-time updates and traffic monitoring with a topological view to help determine movements of objects and calculate the most effective route. The main challenge in autonomous navigation using computational geometry methods is adapting to the changes in the environments while maintaining an efficient path. Our method dynamically recalculates the path when a new obstacle is added to the agent's view, ensuring the agent has the necessary domain knowledge to calculate the path. The project tests the system’s performance and capabilities through a variety of custom tests that were built to isolate behaviour/actions. We measured success through the agent's ability to reach its destination without collisions and calculate an efficient path.